
講座概要
本講座は、当社の提供する「マイコン教育コース」に続く講座として位置づけられているCAN(Controller Area Network)通信編です。
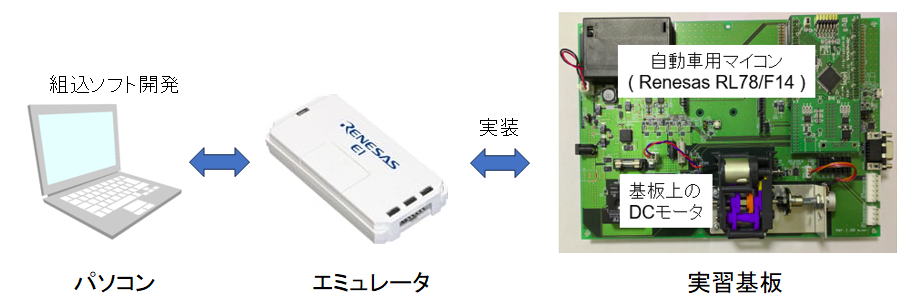
「マイコン教育コース」では、最終ゴールを”DCモータの制御ソフトウエアをハンドコードで実装すること”に設定し、そのソフトウェアを実装する為に必要な組込プログラミングの知識・技術を習得しました。他の講座と同様に、講師の説明・操作の実演と同じように操作して課題を実施する演習と、同じような課題を受講者様自身が自分で実施する実習のセットの構成になっています。この演習と実習の繰り返しによって、実際にCコード書いて実装の方法を身に付けていきます。
元々、CANは自動車業界における規格でしたが、その汎用性と信頼性の高さから自動車業界以外の産業でも用いられるようになりました。
本講座はCAN通信に関する実習ベースの組込プログラミング演習ですので、隣の受講者と実際に通信するなどグループワーキング的な要素もあります。自動車業界以外の組込技術者の方も是非、この機会にCAN通信を習得していただければと思います。
本講座の具体的な課題は、1つのIDのCANメッセージの送受信から、演習→実習の繰り返しによって組込プログラミングを学習・習得していき、最終的にはマルチノード(複数ECU間)のCAN通信を実装するところまでやっていきます。
対象者
- 組込開発(マイコンのソフトウェア開発)に携わる技術者
予備知識
- C言語の基本的な知識・経験のある方(文法的な知識・経験)
- 必須ではありませんが、ソフトウェア開発の知識・経験のある方
- 「ES-1 組込プログラミングの基礎講座①」、および「ES-2 組込プログラミングの基礎講座②」が受講済であることが望ましい
目次
| はじめに | |
| CAN通信の概要(CAN通信とは、CANの仕組み、仕様の概要) | |
| CAN通信の特徴 電気的特性と伝送方式 ネットワーク構成 IDとデータフレーム アクセス方式 同期方式 エラーチェック 通信速度 | |
| CANプロトコル データフレームの詳細 エラー検出 | |
| CAN dbcファイル | |
| 組込プログラミング演習(1日目) | |
| CAN通信の送受信(基礎) | |
| 演習1 CAN通信の送信(10ms定期送信) | |
| 演習2 CAN通信の受信(割り込み/ポーリング方式) | |
| 実習3 CAN通信の送信 | |
| 実習4 CAN通信の受信 | |
| CAN通信の制御(フィルタ処理、エラー処理) | |
| 演習5 IDフィルタ設定(マスク・フィルタ方式) | |
| 実習6 IDフィルタ設定(マスク・フィルタ方式) | |
| 演習7 エラー検出と処理 | |
| 実習8 エラーカウントに応じた動作変更(LED制御) | |
| 組込プログラミング演習(2日目) | |
| CAN通信のリクエスト&レスポンス | |
| 演習9 CAN通信の送受信(リクエスト&レスポンス) | |
| 実習10 CAN通信のリクエスト送信と応答受信 | |
| 実習11 CAN通信のリクエスト受信と応答送信 | |
| 【参考】 UDSの概要 | |
| 総合演習 | |
| 演習12 マルチノード通信 | |
| 【参考】 CAN FDについて | |
| 【参考】 CAN通信のセキュリティと偽装対策 |
日数
2日間(1日7時間)
- お客様のご要望に応じて、内容をカスタムすることも可能ですのでご相談ください。
- 1日の講座に内容を圧縮することも可能です。また、さらに高度な処理(多フレーム送受信、8バイトを超えるデータ長の取り扱いなど)の応用的な内容を加えることも可能です。
受講料
オンサイト講座 1日:300,000円(税抜)
- 10名を越える場合は、受講料が変わってきますのでお問合せください。
- マイコン学習キット、開発環境のレンタル料が受講料とは別に必要になります。
- 遠方の場合の出張費など別途費用が発生する場合もございます。また、予告なく変更・改定になる場合がございますこと予めご了承ください。